Один из основателей и руководитель компании Boston Dynamics Inc, расположенной в городе Кембридже неподалеку от Массачусетского технологического института (МТИ), Марк Райбер родился 22 декабря 1949 года. Он получил степень бакалавра по электротехнике в Северо-Восточном университете в 1973 году и докторскую степень в МТИ в 1977 году. С 1977 по 1980 годы Райбер занимался сенсорными системами роботов в Лаборатории реактивного движения в Калифорнийском технологическом институте. В 1980 году в Университете Карнеги-Меллона он основал лабораторию Leg Lab, которую в 1986 году перевел в МТИ и возглавлял до 1995 года. Leg Lab хорошо известна своими исследованиями шагающих роботов, имитирующих механизмов и анимированных фигур. В этой лаборатории была создана целая серия роботов, в том числе одноногих прыгунов, двуногих бегунов и два механизма, подобных кенгуру. Все они могли перемещаться по ровным тропинкам, активно себя уравновешивать, подниматься по прямой лестнице, довольно быстро перемещаться, развивая скорость 13,1 миль в час, бегать несколькими аллюрами, а также выполнять элементарные гимнастические движения. Спроектированные Райбером первые самостоятельно удерживающие равновесие прыгающие роботы стали важным этапом в развитии отрасли. Два его робота участвовали в съемках фильма «Восходящее солнце» с Шоном Коннери и Уэсли Снайпсом в главных ролях.
С 1981 по 1986 год Райбер трудился на факультете информатики Университета Карнеги-Меллона и в Институте робототехники, а с 1986 по 1995 годы преподавал электротехнику и информатику в МТИ и был сотрудником Лаборатории искусственного интеллекта. Он написал книгу «Шагающие уравновешенные роботы», вышедшую в издательстве MIT Press, состоит в редакционном совете Международного журнала робототехнических исследований, был гостевым редактором двух его выпусков, посвященных шагающим системам, а также состоит в Ассоциации по продвижению искусственного интеллекта. В 1992 году Райбер основал робототехническую компанию Boston Dynamics, которая в своей деятельности во многом опирается на подражание природе. В декабре 2013 года компанию Boston Dynamics приобрела фирма Google. По поводу этой сделки Райбер заметил, что он был «в восторге от способности Энди Рубина и Гугл думать в очень, очень крупном масштабе … имея ресурсы для того, чтобы это осуществить». В марте 2016 года Гугл выставил фирму Райбера на продажу, и в июне 2017-го ее приобрел SoftBank.
 Полный производственный цикл
Полный производственный цикл
Компания Boston Dynamics берет начало в Массачусетском технологическом институте, где создавались первые роботы, способные бегать и маневрировать, как животные. Сегодня она делает следующий шаг на пути своего развития, наделяя сложные механические конструкции способностью управлять движением и поддерживать равновесие, оснащая их новейшей электроникой и программным обеспечением, позволяющим видеть окружающий мир, прокладывать в нем путь и осознавать происходящие там события. Для решения этих задач фирма собрала команду опытных инженеров и ученых, обладающих развитым аналитическим и конструкторским мышлением, способных собственноручно воплощать смелые проекты в жизнь. Компания гордится тем, что строит машины, которые одновременно разрушают границы сложившихся представлений о технике и действуют в реальном мире. Ее конструкторские коллективы ведут проекты от первоначальной концепции до проверочных прототипов, затем до стадии «собрали и проверили», и далее до полевых испытаний и производства.
 Handle
Handle
Примером нестандартного подхода к проектированию роботов является созданный в Boston Dynamics механизм под название Handle. Это робот, который сочетает в себе способность ног передвигаться по пересеченной местности с эффективностью колес. Он использует многие из тех же методов динамики, соблюдения равновесия и совершения подвижных манипуляций, которые были выявлены в конструкциях четвероногих и двуногих роботов, создаваемых этой фирмой, однако, имея только десять приводных соединений, устроен намного проще. Его колеса быстры и эффективны на плоских поверхностях, в то время как ноги могут направиться почти повсюду. Handle способен поднимать тяжелые грузы, при этом занимая мало места, что позволяет ему маневрировать в стесненных условиях. Все соединения Handle скоординированы для обеспечения высокопроизводительных и подвижных операций.
 BigDog
Большая Собака и альфа-самец из бостонского зверинца
BigDog
Большая Собака и альфа-самец из бостонского зверинца
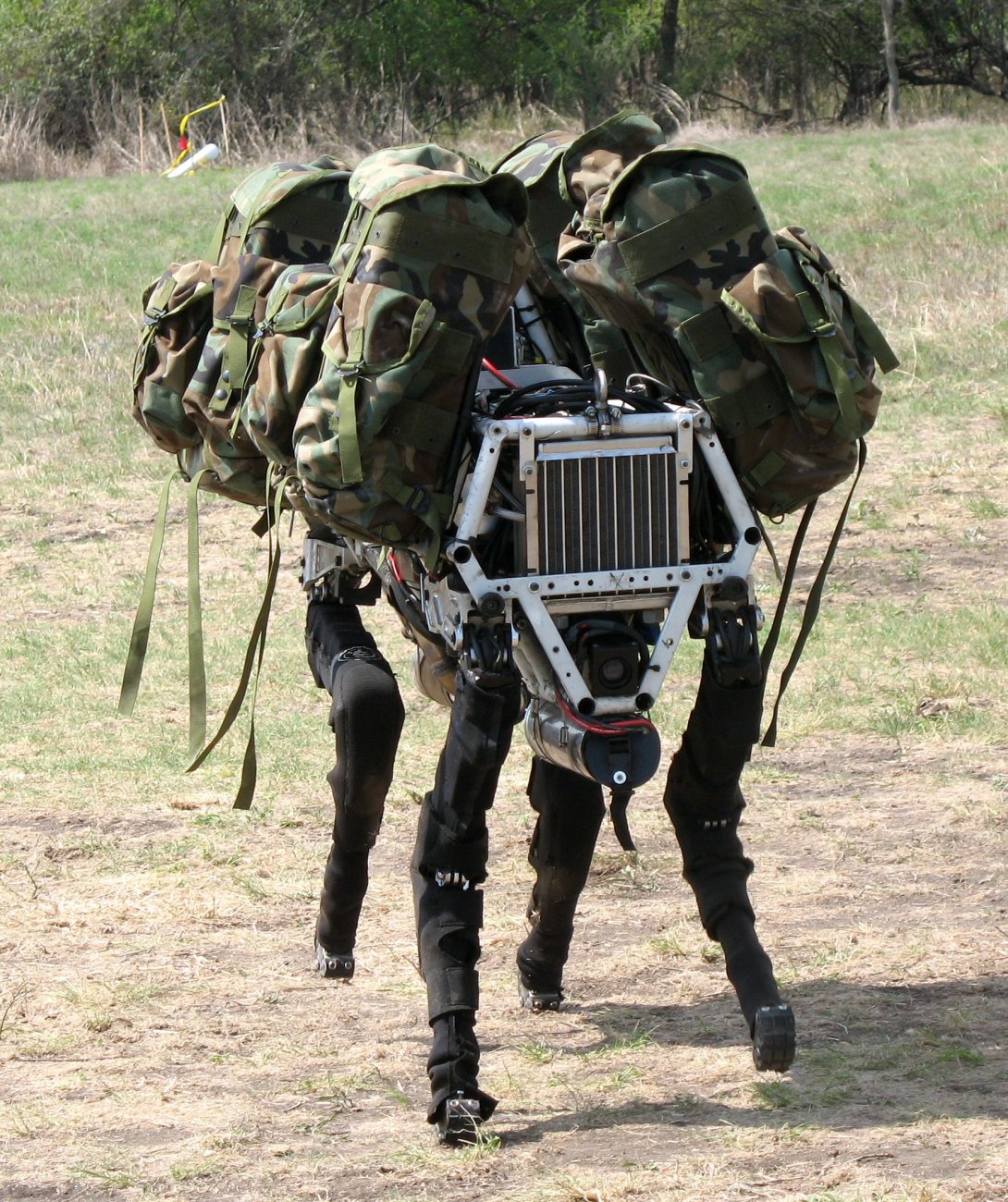
Другим заслуживающим внимания детищем компании Boston Dynamics является BigDog, - первый современный робот, способный действовать в условиях сложного ландшафта, а также первый шагающий автоматический механизм, покинувший пределы лаборатории и вступивший в большой мир. У BigDog есть четыре ноги, которые имеют такие же сочленения, как у животных. Встроенные в его конечности смягчающие элементы поглощают удары и перераспределяют энергию во время ходьбы. BigDog имеет размеры крупной собаки или маленького мула. Бортовой компьютер этого робота управляет его передвижением, обрабатывает информацию, поступающую с датчиков, и поддерживает связь с пользователем. Система управления робота BigDog сохраняет его равновесие, контролирует перемещение по местности самых разных видов и осуществляет навигацию. В систему датчиков Большой Собаки входят гироскоп, лидар и стереоскопическое зрение. Сенсорная система отслеживает положение суставов, прилагаемое ими усилие, наличие контакта с землей и силу давления на нее. Прочие датчики фокусируются на внутреннем состоянии робота, отслеживая гидравлическое давление, температуру масла, функции двигателя, заряд батареи и другие показатели. BigDog движется со скоростью 10 км/ч, поднимается на склоны под углом до 35 градусов, ходит по булыжникам, взбирается по скользким от грязи пешеходным тропинкам, движется по снегу и воде и переносит грузы весом до 150 кг. Разработка исходного робота BigDog финансировалась Управлением перспективных исследовательских проектов Министерства обороны США (DARPA). Работа по его оснащению манипулятором финансировалась по программе RCTA, реализацией которой занималась Военная исследовательская лаборатория.
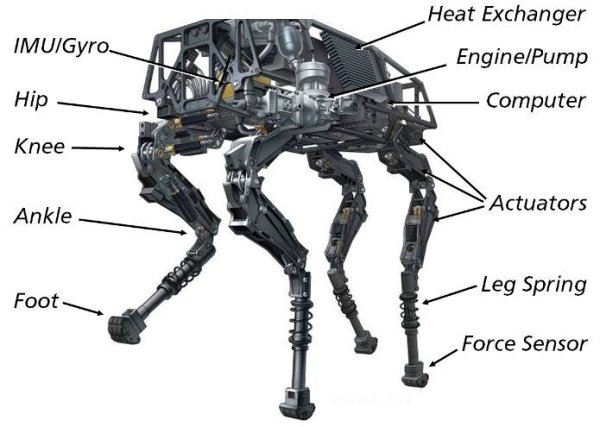 Устройство робота BigDog
Устройство робота BigDog
К так называемым шагающим системам поддержки пехоты относится разработка под названием LS3. Этот «альфа-самец» шагающих роботов переносит тяжелые грузы по пересеченной местности. LS3 был разработан, чтобы направляться повсюду, куда морские пехотинцы и солдаты движутся пешком, и при этом нести их поклажу. LS3 способен перемещать 182 кг снаряжения и топливо, которого хватит на 32-километровый поход длительностью 24 часа. Во время одного испытания на ровной местности LS3 переносил более 500 кг полезной нагрузки. Этот робот автоматически следует за своим проводником, применяя компьютерное зрение, и потому не нуждается в постоянном управлении. Он также способен отправляться в назначенные ему места, исследуя местность, обходя препятствия и прокладывая путь с помощью системы GPS. Разработка LS3 оплачивалась организацией DARPA и морской пехотой США. Для создания LS3 компания Boston Dynamics собрала уникальный коллектив, в том числе инженеров и ученых из Carnegie Mellon, Лаборатории реактивного движения, Bell Helicopter, AAI Corporation, и Woodward HRT.
 LS3
Быстроногая Дикая Кошка, устойчивый Спот и бесшумный СпотМини
LS3
Быстроногая Дикая Кошка, устойчивый Спот и бесшумный СпотМини
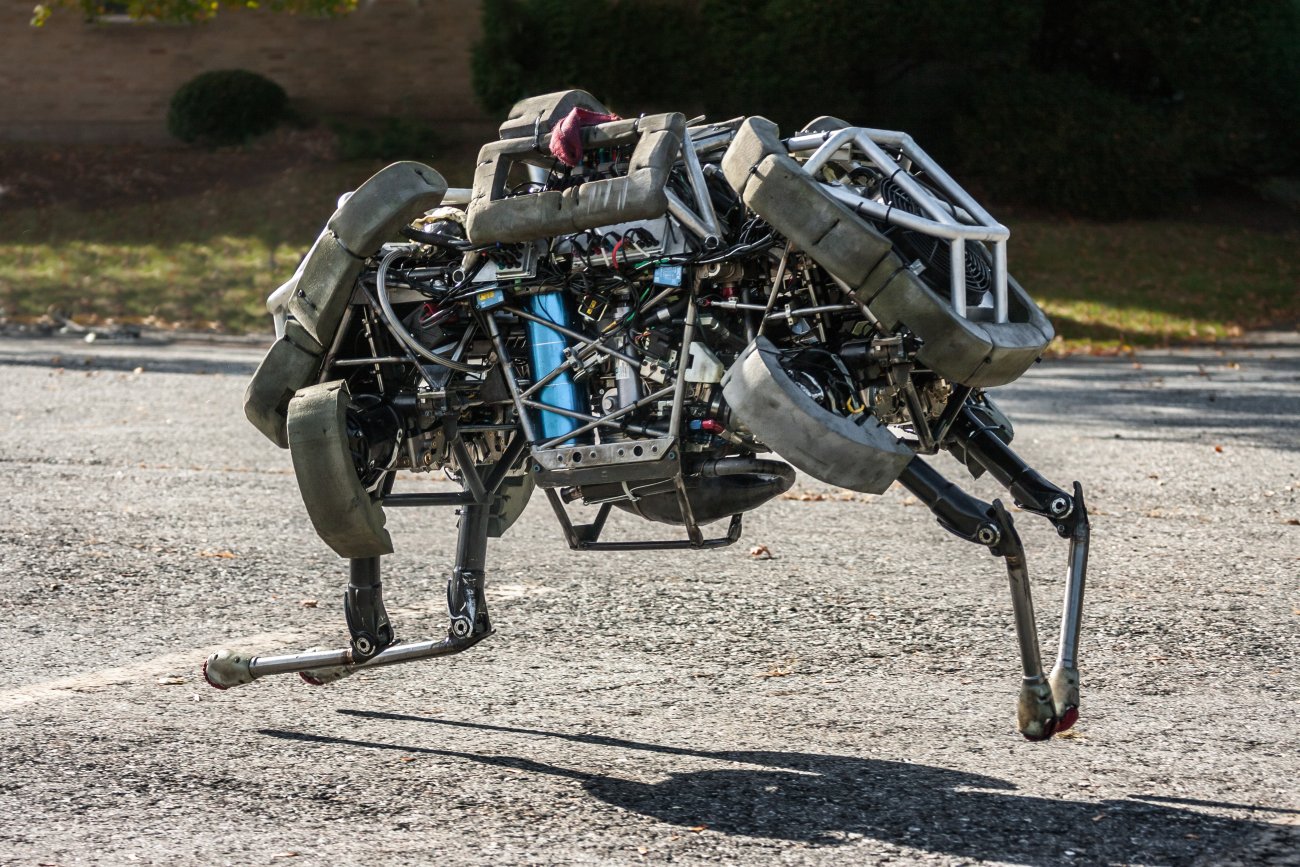
Выпущенный компанией Boston Dynamics механизм под названием WildCat является самым быстрым четвероногим роботом на земле. Он бегает со скоростью 32 км/ч, при этом маневрируя и балансируя. WildCat использует галопирующий аллюр совсем как собака или лошадь, а также наклоняется на поворотах, чтобы сохранить равновесие и сцепление с поверхностью. Он является самым быстрым автономным четвероногим роботом в мире. Предыдущий рекорд скорости составил 21 км/ч и был установлен в 1989 году в МТИ. WildCat приводится в действие сжигающим метанол мотором, тяга от которого переходит на систему гидравлических приводов и создает громкий шум. Робот использует множество аллюров, в том числе рысь, прыжки и галоп, чтобы поддерживать равновесие и совершать маневры на относительно ровной местности. Для контроля и стабилизации на бегу его бортовой компьютер использует алгоритмы динамического контроля. Управлять «Дикой Кошкой» помогает система датчиков, включающая инерционные измерительные устройства (IMU), проприоцепцию, визуальную одометрию, и отслеживающая контакт с землей. Для точного измерения высоты и положения робота применяется набор лазерных дальномеров. Стабилизирующая «Дикую Кошку» система управления была впервые разработана для лабораторного прототипа Cheetah, бегавшего со скоростью 48 км/ч, то есть быстрее, чем восьмикратный олимпийский чемпион и одиннадцатикратный чемпион мира Усэйн Болт. По ряду причин скорость Читы была намного выше, чем у WildCat, - в том числе потому, что ее испытания проходили в помещении на беговой дорожке, то есть без какого бы то ни было сопротивления ветра. Ко всему прочему Cheetah могла двигаться только по ровной поверхности и приводилась в действие очень большим дистанционным источником питания. Разработка WildCat финансировалась программой DARPA по максимальной мобильности и манипуляции.
 LS3
LS3
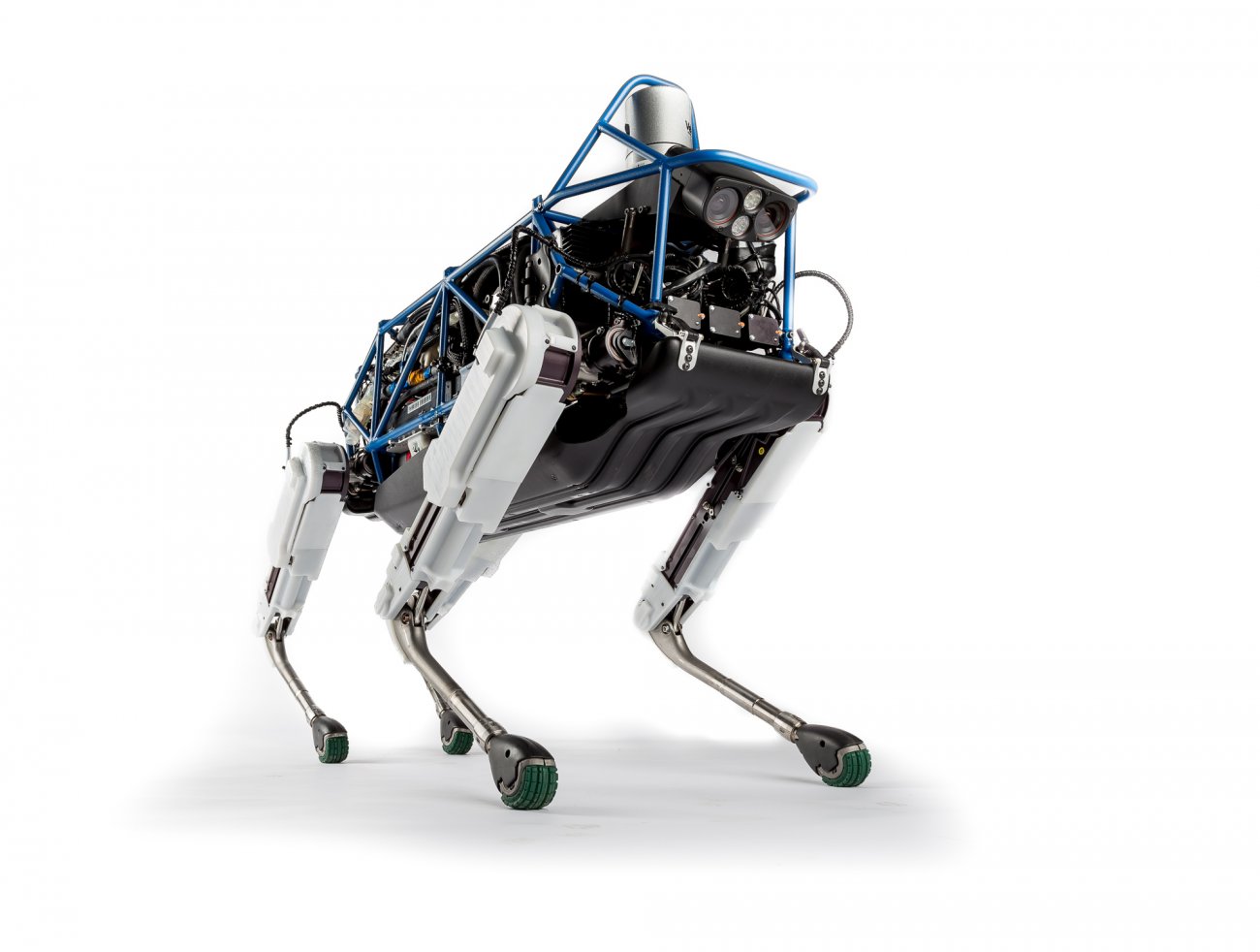
При создании робота под названием Spot были учтены уроки, полученные во время разработки моделей BigDog, Cheetah и LS3. В результате из стен Boston Dynamics вышел тихий четвероногий робот, способный передвигаться по пересеченной местности усложненного профиля и обладающий повышенной устойчивостью. Спот создан для применения на улице и в помещениях. Он стал основой для нового подхода к управлению подвижным роботом, которое обеспечивает истинную автономность в пределах досягаемости. Спот действует на электрической тяге и оснащен гидравлическими приводами. Он воспринимает окружающую его пересеченную местность с помощью лидара и стереоскопического зрения и оснащен датчиками, необходимыми для поддержания равновесия и преодоления препятствий. Этот робот может нести полезную нагрузку весом 23 кг и работать 45 минут на аккумуляторном заряде. Созвучное имя носит небольшой проворный четвероногий робот SpotMini, умеющий переносить предметы и взбираться по лестницам. Его вес с манипулятором составляет 30 кг и 25 кг – без него. СпотМини будет использоваться в офисах, жилых домах и на улице. Он полностью электрифицирован и может на одном заряде проработать около 90 минут в зависимости от применения. Это самый тихий робот из построенных компанией Boston Dynamics. SpotMini унаследовал всю подвижность своего более крупного брата Спота, при этом получив возможность воздействовать на объекты, используя руку с пятью степенями свободы и усиленные датчики восприятия. Сенсорная система СпотаМини включает стереокамеры, IMU, а также вмонтированные в конечности датчики положения и силы, помогающие прокладывать путь и совершать операции.
 WildCat
Стройный Атлас, Песчаная Блоха на колесах и всепроходный RHex
WildCat
Стройный Атлас, Песчаная Блоха на колесах и всепроходный RHex
Самый динамичный гуманоид в мире Atlas применяет балансирование и все способности своего тела, чтобы выполнять двуручные мобильные манипуляции. Это новейший в линейке современных человекоподобных роботов, которых разрабатывает Boston Dynamics. Система управления Атласа согласовывает движения рук, туловища и ног, тем самым значительно расширяя размах действий робота и его рабочее пространство. Способность этого гуманоида удерживать равновесие при выполнении заданий позволяет ему трудиться в большом объеме, при этом находясь в стесненных условиях. Детали Атласа изготовлены методом трехмерной печати, чтобы сэкономить вес и пространство, что позволило создать замечательного компактного робота с высоким соотношением силы и веса и заметно увеличенным рабочим объемом. Стереоскопическое зрение, дальномеры и прочие датчики позволяют Атласу манипулировать объектами вокруг него и двигаться по пересеченной местности. Атлас сохраняет равновесие, когда его толкают или бьют, и может подняться после падения.
 Spot
Spot
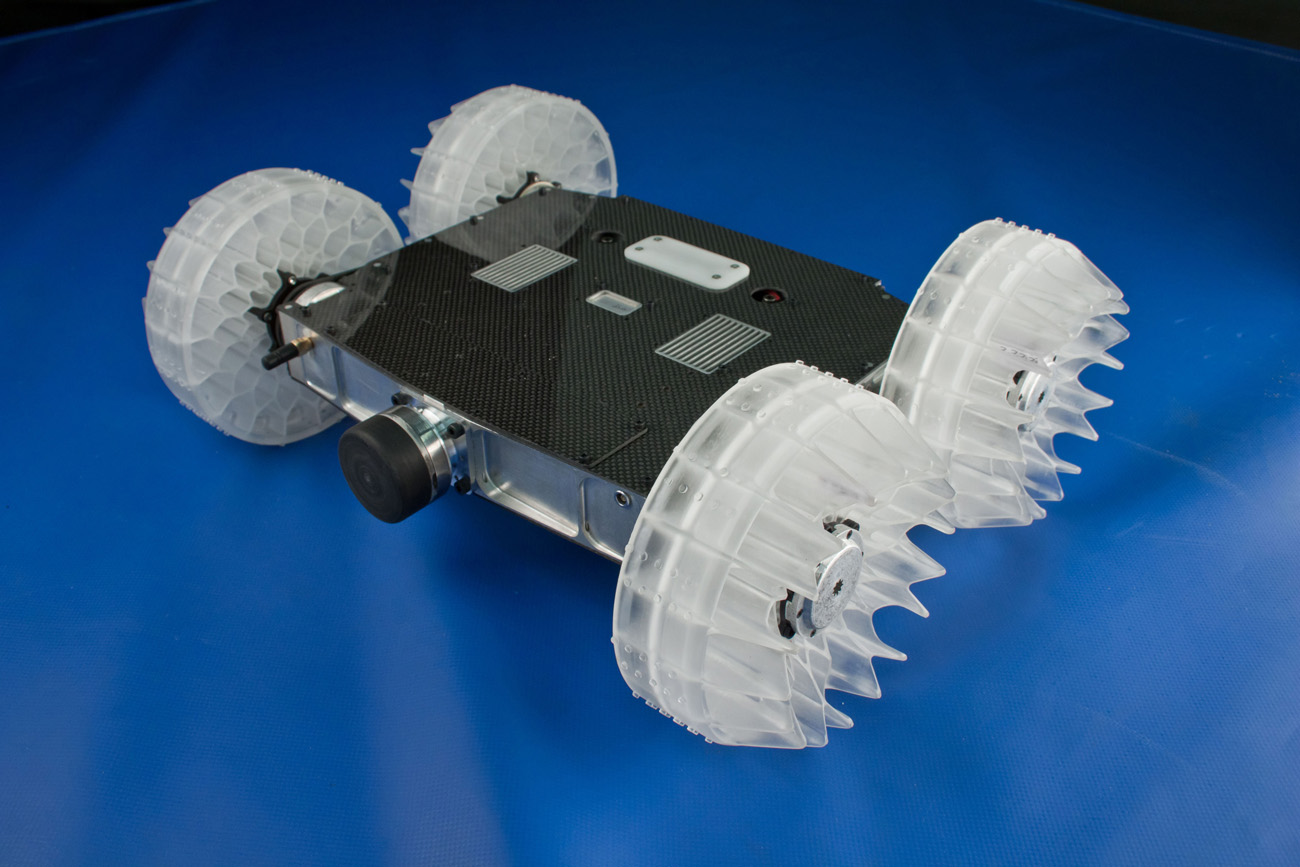
SandFlea – это маленький робот на четырех колесах и с мощной толчковой ногой, способный одним прыжком покорять невысокие здания. По плоской местности он едет, внешне ничем не отличаясь от обычной радиоуправляемой игрушки, однако, приблизившись к непреодолимому для детской машинки препятствию, легко его перескакивает, поднявшись в воздух на десять метров. Высоты его прыжка достаточно, чтобы, например, в застроенном коттеджами поселке перелететь через изгородь или стену, вскочить на крышу дома, взобраться по лестнице или влететь в окно на втором этаже. Чтобы сохранять правильное положение во время полета, робот использует свои колеса в качестве гироскопов. Это помогает ему совершать мягкую посадку на все четыре колеса и позволяет оператору получать с бортовой камеры устойчивую картинку. На одном заряде SandFlea может прыгнуть примерно 25 раз. Boston Dynamics разработал SandFlea на деньги Сил быстрой экипировки американской армии (REF), DARPA и Национальной лаборатории Сандия. В настоящее время SandFlea не выпускается.
 SpotMini с манипулятором
SpotMini с манипулятором
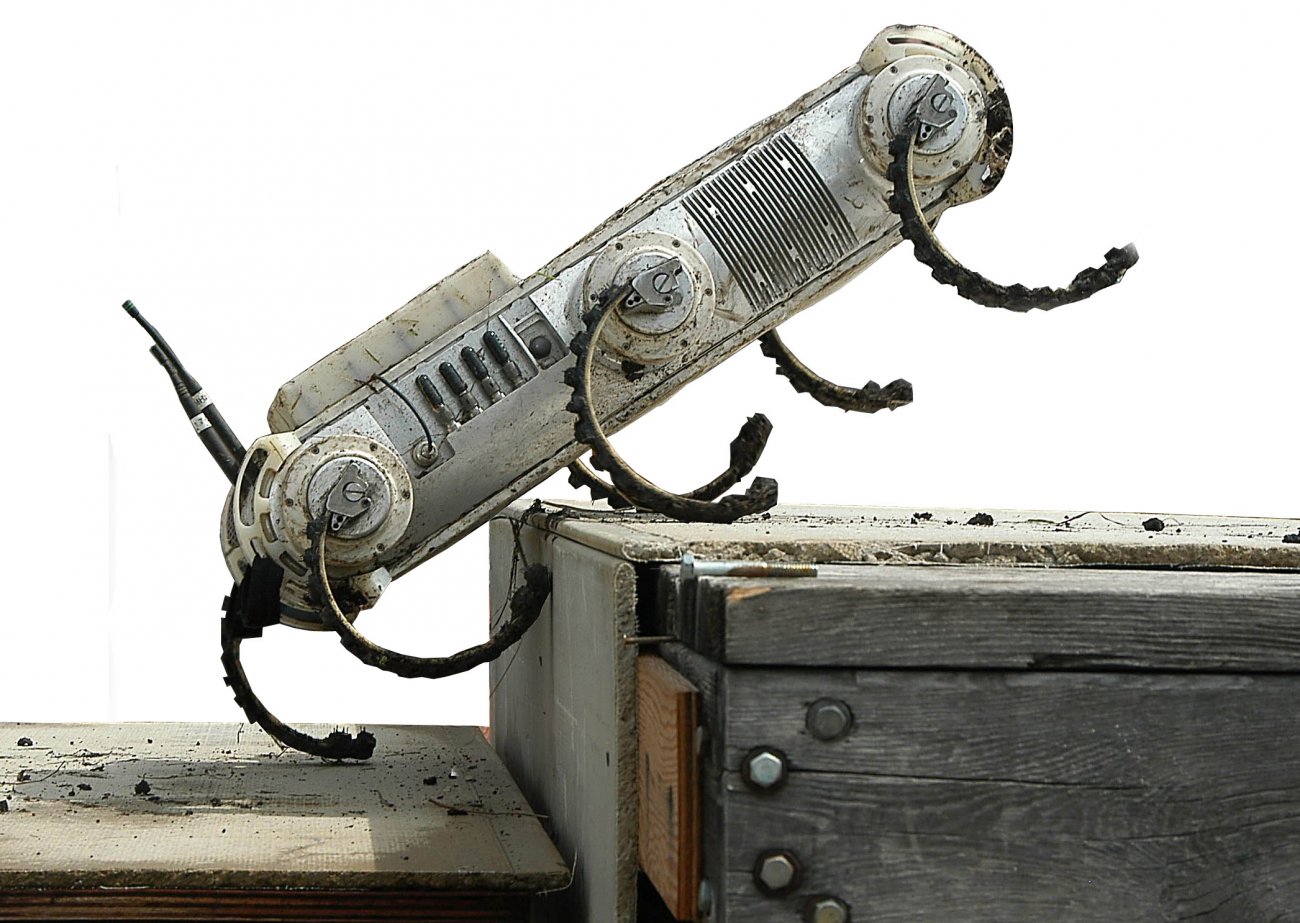
Робота RHex называют «пожирателем пересеченной местности». Это пассивно устойчивый шестиногий механизм, обладающий высокой подвижностью на естественной поверхности со сложным ландшафтом. Его независимо управляемые изогнутые плавной дугой конечности движутся особым образом, позволяющим путешествовать по канавам и буеракам при минимальном участии оператора. RHex способен преодолевать гористые участки, грязь, песок, растительность, железную дорогу, лестницы и лежащие столбы. Его передние и задние камеры обеспечивают пользователю дистанционное видение окружающей обстановки. Герметичное тело делает RHex полностью работоспособным в сырую погоду, в грязи и болотах, а также в проточных водопропускных трубах. Замечательные способности RHex передвигаться по местности сложного профиля были подтверждены во время независимых правительственных испытаний. Этот робот разрабатывался на деньги DARPA и REF.
 Atlas
Ничто человеческое не должно быть чуждо роботам
Atlas
Ничто человеческое не должно быть чуждо роботам
Основатель и главный инженер компании Boston Dynamics Марк Райбер принял участие в состоявшемся 5 и 6 декабря 2016 года в Лондоне форуме TechCrunch DISRUPT, где выступил с докладом «Роботы!». Он вышел на сцену вместе с ведущим Дарреллом Этерингтоном, чтобы поговорить о том, как должен проходить процесс обучения робота, обсудить свои планы на будущее, а затем показать одно из своих механических творений. «Добро пожаловать в Лондон», - начал беседу модератор и предложил совершить небольшой экскурс в историю. «Я знаю, ребята, что вам уже 26 лет», - заметил он, имея в виду компанию Boston Dynamics. «Да, мы старые ребята», - подтвердил Райбер. Ведущий заметил, что среди участников конференции эта фирма была, возможно, старше многих компаний и попросил вспомнить, как и с чего именно она начинала свою деятельность, а также какой идеей при этом хотела поделиться с миром. Райбер рассказал, что до начала ее работы он трудился в МТИ, занимался там постройкой роботов и вместе с коллегами хотел узнать, могли ли они это делать в рамках отдельной компании. Однако независимо от организационной формы они стремились к одной и той же цели, - а именно: строить машины, которые могут делать то, на что способны люди и животные. Другими словами, созданные Марком и его единомышленниками автоматические устройства должны быть подвижными, готовыми самостоятельно действовать в окружающем мире, ловкими, как люди, и обладать таким же, как у людей, восприятием, позволяющим смотреть вокруг и понимать, что происходит.
 SandFlea
SandFlea
Все это значит, - заметил ведущий, - что в то время Райбер занимался манипуляциями машин в окружающей среде и преодолением ими существующих в ней препятствий, то есть тем же самым, чем занимаются все прочие роботостроители, а не созданием механического «человека», который может, например, готовить пищу, произносить речи или совершать нечто в этом роде. Райбер ответил, что в долгосрочной перспективе они бы хотели научиться выпускать роботов, способных делать перечисленные вещи и вообще все, что «можем делать вы и я». Однако в настоящий момент внимание фирмы сосредоточено на подвижности, то есть производстве роботов, которые могут пойти куда угодно. Марк предложил посмотреть первый видеоролик, к которому он даст пояснения: «Там показаны некоторые роботы, созданные для перемещения в «неструктурированном» мире»». На экране появился с жужжанием взбирающийся по травянистому лесному склону робот BigDog. Далее последовали кадры, на которых он брел по покрытой льдом и окруженной снегом площадке. К нему подошел человек и сильно толкнул ногой в бок, из-за чего BigDog сместился со своего пути довольно далеко вправо, однако устоял и начал возвращаться на исходную траекторию. Несколько раз поскользнувшись, он быстро восстанавливал равновесие, поднимался с колен и уверенно продолжал свой путь.
 Робот SandFlea готовится к прыжку
Гордые родители механических детей
Робот SandFlea готовится к прыжку
Гордые родители механических детей
Во время демонстрации этого видео Райбер пояснил, что BigDog был первым роботом, которого построила компания Boston Dynamics. Главным достоинством Большой Собаки является тот факт, что во время движения она способна активно удерживать равновесие. У нее есть датчики в ногах, сообщающие о происходящих с ними событиях, и программное обеспечение, позволяющее реагировать на изменения в окружающей обстановке. На следующих кадрах был показан четвероногий робот LS3, который по усыпанной булыжниками сопке не спеша спускался в долину вслед за шедшим далеко впереди человеком в экипировке, похожей на военную. Этот отрывок сменился кадрами, на которых LS3 тщетно пытался пройти в лесу сквозь кустарник и, несмотря на то, что растительность оказалась довольно густой, упрямо в нее углублялся. Далее было показано, как тяжелый LS3, заметно покачиваясь, поднимается по склону, покрытому снегом, утапливая в него ноги по самые колени. В следующем отрывке робот, похожий на WildCat, быстро пробежав по площадке, резко развернулся на ней кругом, при этом упав на передние колени и по инерции поднявшись на них почти вертикально, однако в итоге удержав равновесие и снова встав на четыре конечности. Далее можно было увидеть, как изящный робот Спот выбирается из засыпанного листвой и камнями оврага, и как другой Спот легко поднимается по довольно крутому каменному крыльцу ко входной двери в дом. Модератор заметил, что некоторые люди могут прийти к выводу, будто Райбер и его коллеги обходились с роботами жестоко, что звучит явно нелепо, «потому что это робот, однако»… Он попросил ученого объяснить, почему для демонстрации того, на что были способны его творения, применялись такие неоднозначные методы. «Мы подобны гордым родителям, пытающимся выставить напоказ способности наших роботов, и вы не сможете увидеть так много, если они будут просто гулять рядом».
 Робот SandFlea прыгнул
Робот SandFlea прыгнул
Райбер пообещал, что некое «вмешательство» такого рода в деятельность роботов он еще покажет. Ведущий заметил, что все равно подобное обращение с машинам тревожит, ибо трудно представить, как гордые родители человеческого ребенка изберут аналогичный метод для демонстрации его умений. На это Райбер с улыбкой возразил, что у него есть съемка подобных испытаний, через которые пришлось пройти его дочери, и модератор засмеялся. Далее Марк предложил взглянуть на то, как роботы заходят в людские дома, и заметил, что вместе с единомышленниками изучает идею доставки таким методом посылок. Не исключено, что вместо новомодных и разрекламированных дронов эту задачу смогут решать обыкновенные «старые» шагающие роботы. В подтверждение слов Райбера на экране появился заходящий в жилой дом с крыльца Спот. На следующих кадрах другой Спот подошел к стоящему в помещении муляжу двери, взял ее схватом за ручку, и, потянув на себя, приоткрыл, а потом, заходя в эту «дверь», придерживал ее манипулятором, чтобы она не закрылась. Однако это его достижение, по всей видимости, инженеров не впечатлило, и потому в следующем отрывке распахнутую было Спотом дверь стоявший рядом человек стал закрывать. Это развитие событий ничуть не смутило робота, и он, упершись в дверь механической рукой, удерживал ее от дальнейшего закрывания, при этом топчась на месте. После нескольких попыток воспрепятствовать вхождению Спота в дверь человек отступил, и машина, наконец, прошла сквозь входной муляж. Эти кадры Райбер назвал еще одним примером проявления опеки «гордых родителей», желающих показать, что робот обладает достаточным набором анатомических средств и сноровкой, а также способностью составлять схему дальнейших действий для того, чтобы даже при вмешательстве со стороны он смог придумать новый план и сохранить равновесие под внешним механическим воздействием.
 RHex
Неунывающий Атлас не пасует перед трудностями
RHex
Неунывающий Атлас не пасует перед трудностями
Далее последовали кадры, где человекоподобный робот Атлас приближался к лежащей на полу коробке, по бокам которой были наклеены белые листы с так называемыми маркерами – черными прямоугольниками c разбросанными внутри белыми вкраплениями. Когда Атлас присел и наклонился, чтобы взять коробку в руки, подошедший человек подвинул ее хоккейной клюшкой метра на полтора вперед. Обнаружив ее исчезновение, Атлас разогнулся и снова приблизился к ней. Но едва он приподнял коробку, как лаборант выбил ее из рук робота, ударив по ней прямым концом клюшки и, затем снова, словно шайбу, несколько раз отодвинул коробку от подходившего к ней Атласа. Райбер пояснил, что это был еще один пример преодоления роботом помех, создаваемых окружающей средой на его пути к цели. В данном случае он получил команду поднять коробку, и выполнить это задание никто не помогал. Робот использует систему зрения, чтобы увидеть коробку и маркеры на ней, а также спланировать свой путь и взять ее. «Затем наш инженер вмешивается в этот процесс». Ведущий, заметив, что, быть может, задает странный вопрос, поинтересовался, понимает ли робот, что происходит вмешательство как намеренная помеха? Райбер пояснил, что машина просто узнает, что у нее нет в руках коробки, которую она должна взять, и потому приходит к выводу: «Окей, я должна найти коробку». Она смотрит вокруг, находит коробку, идет и подбирает ее. «Прошлым летом мы решили взять Атласа – робота примерно такого же, как у меня, роста и веса, - и вывезти на лыжную базу, чтобы проверить его способность подниматься по новым видам лестниц». На экране появились кадры с Атласом, идущим среди столов и стульев в баре. Райбер пояснил, что здесь можно увидеть, как человекоподобный механизм сам обходит препятствия с помощью зрительной системы.
 RHex
RHex
На выездных испытаниях конструкторы также осуществляли некую совместную деятельность «робота и мира», как это назвал Райбер, поясняя кадры, где Атлас передвигался, держа носилки, второй конец которых был в руках у шедшего впереди человека. Модератор напомнил ученому, что тот всегда преследовал одну и ту же цель, и спросил, не изменился ли его подход к работе по той причине, что, как могло показаться, после покупки компании Гуглом его представители прямо заявили: «Ребята, вы сворачиваете свою работу на прежнего подрядчика». В связи с этим ведущий поинтересовался, не пришлось ли Марку после той сделки менять всю привычную производственную программу. Он ответил, что, по его мнению, основные технические способности, которыми должны обладать роботы, нисколько не меняются, используются ли они в целях обороны или для спасения при авариях. Например, недавно он посетил Фукусиму, чтобы изучить возможности применения там роботов в некоторых опасных для человека местах. Однако при решении более прозаических задач, например, для входа в людские дома с целью доставки посылок, порой точно так же, как и в местах техногенных катастроф, приходится иметь дело с пересеченной местностью и неизвестной окружающей средой, и потому накопленные фирмой наработки, - зрение, система управления, механическое устройство, - остаются одинаково востребованными независимо от того, для чего применяются автоматические помощники. По словам Райбера, все равно сначала приходится создавать универсальную технологию, а затем настраивать робота для решения каждой конкретной задачи.
 RHex
От общего – к частному
RHex
От общего – к частному
Например, недавно инженеры Бостон Динамикс узнали, глядя на процесс подъема роботов по лестнице в жилые дома, а также заставляя их совершать некоторую работу в помещении, в том числе в офисах, что тонкости конструкторских решений для таких применений отличаются от тех случаев, когда роботы действуют на улице в лесу, где им приходится иметь дело только с деревьями, грязью и листвой. Вот почему теперь компания разрабатывает и такие алгоритмы, которые больше приспособлены к новым практическим приложениям. Райбер считает, что цель его фирмы – это в первую очередь создать потенциал, применимый к широкому ряду задач, и лишь затем она начнет изучать конкретные приложения, для которых системы и конструкция машин будут настроены специально. Модератор поинтересовался, намерена ли компания просто поставлять детали тем, кто проявит желание усовершенствовать ее роботов для конкретных применений, или она сама будет осуществлять такие настройки. Этот вопрос Райберу очень понравился, и он ответил, что в последнее время его фирма много думала о том, чтобы создать платформу, которую смогут использовать разработчики приложений, однако на этом пути ее ждет довольно много нерешенных вопросов.
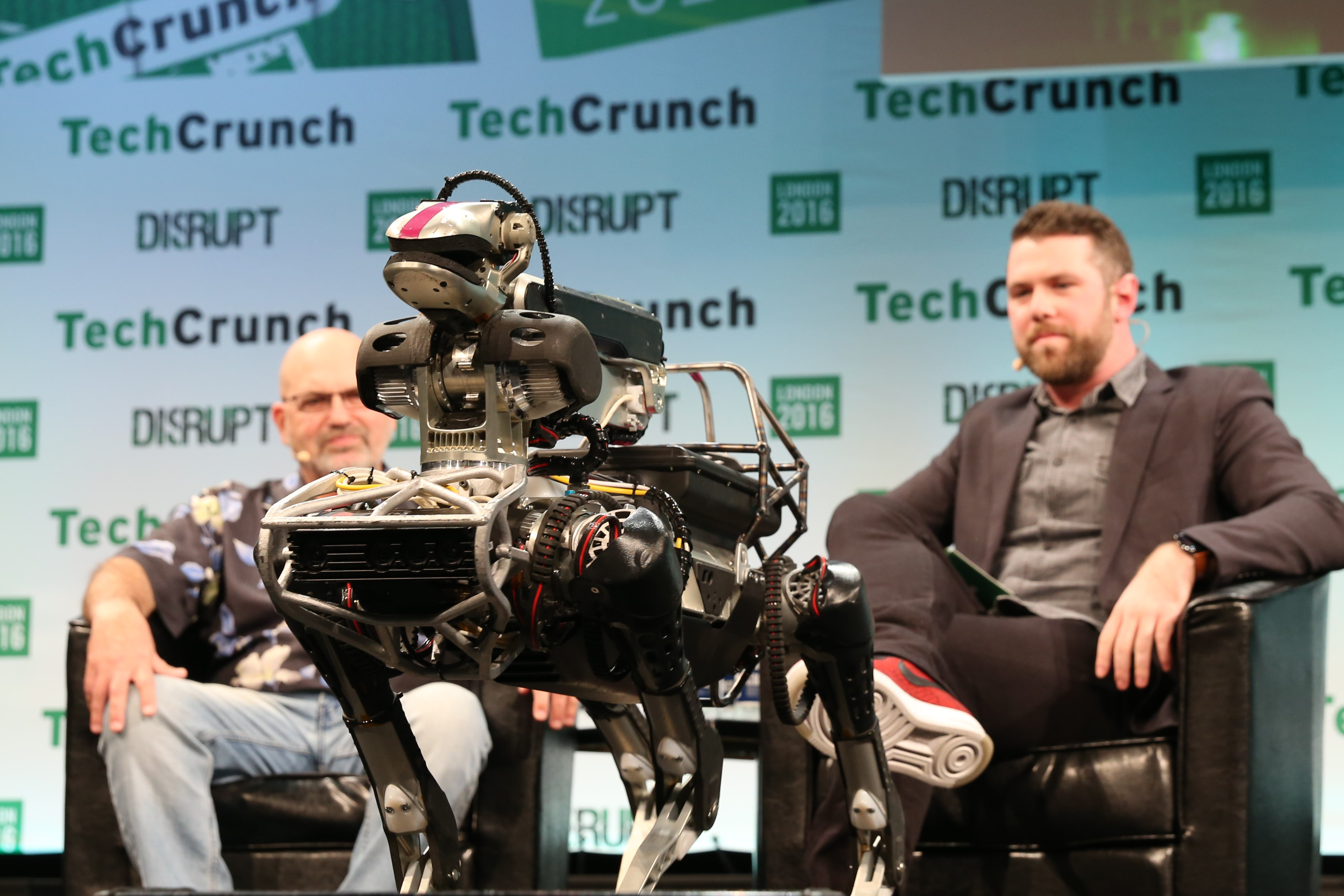 SpotMini с манипулятором на сцене
SpotMini с манипулятором на сцене
Компания пока еще не знает, насколько интенсивно она будет сотрудничать с создателями приложений. В ее нынешние планы входит, возможно, работать с ними довольно тесно, чтобы создать некие эталонные приложения собственными силами и потом посмотреть, как далеко можно пойти по этому пути. Модератор поинтересовался, требует ли этот процесс подготовки множества новых талантливых сотрудников – ведь, как могло показаться, пользовательский опыт или нечто подобное – это вовсе не то, на чем Бостон Динамикс раньше заостряла свое внимание. Райбер ответил, что новым для развития их мысли направлением стало сокращение стоимости роботов. Те механизмы, которых показали на видео, стоят все еще довольно дорого, и потому фирма хотела бы увидеть, может ли она снизить стоимость производства начиная с расходов на создание прототипа заканчивая расходами на выпуск продукта. Это тот момент, когда компания начинает переподготовку кадров и, быть может, поиск новых талантливых сотрудников.
 SpotMini
Людское вмешательство – не повод отказаться от стремления к цели
SpotMini
Людское вмешательство – не повод отказаться от стремления к цели
Дальше Райбер предложил посмотреть еще один видеофрагмент с роботом, стоимость которого компания хотела по возможности уменьшить. На экране появился стоящий боком Спот, под туловищем которого между передней и задней парами ног проползал похожий на него, но при этом в два-три раза меньшего размера другой робот. Райбер объяснил, что это СпотМини, который весит примерно в два раза меньше, чем предыдущий Спот, то есть около 60 фунтов, а для привыкших считать в метрической системе это около 28 килограммов. Действие фрагмента разворачивалось в помещении, по комнатам которого робот отправился в небольшое путешествие. В одной из них за столом сидели люди, и он смог проскользнуть по узкому проходу между спинками их стульев и стоявшими у стены тумбочками. «У него есть рука, - продолжил объяснять Райбер. - Это не настоящий дом и «не настоящие» люди, а просто инженеры». Далее СпотМини приблизился к ведущей на второй этаж лестнице, неподалеку от которой на гладком паркете была разбросана банановая кожура. Наступив на нее, робот звучно упал на бок. Тут же поджав ноги, он выдвинул пристроенный к спине манипулятор, затем, опираясь на него, отжался от пола и вернулся в вертикальное состояние, но в положении лежа. Далее, поднявшись, СпотМини развернулся, и, уже обходя кожуру, вновь направился к лестнице и довольно резво по ней поднялся.
 SpotMini с манипулятором
SpotMini с манипулятором
«Это дом, который мы построили внутри склада для испытаний робота, и вот он использовал свою руку, дабы подняться после того, как упал, ибо «кто-то» оставил там банановую кожуру. Одной из важных способностей этих роботов является хождение по лестнице как вверх, так и вниз». В следующем фрагменте видео поднимавшегося по лестнице СпотаМини стоявший рядом человек схватил за железную скобу, но упрямый механизм не прекратил движение, а стал вырываться, засеменив ногами по ступенькам. «И опять я показал вам здесь «гордых родителей», узнающих больше о способностях робота, создавая ему препятствия и убеждаясь, что он может их преодолеть». Потом СпотМини ходил по лежавшим на полу прямоугольным деревянным брускам. При этом он легко перемещался с одного на другой, не пытаясь сойти на пол в промежутке между ними. Райбер пояснил, что в данном случае использовалась зрительная система c набором передовых улучшений и планированием, позволявшая автоматике рассчитывать шаги так, чтобы двигаться только по заранее установленным участкам местности. Далее было показано, как СпотМини на улице взобрался на каменную насыпь и потом уверенно по ней ходил. Марк заметил, что таким образом демонстрировалось умение робота использовать указанные выше навыки в «более реальном мире».
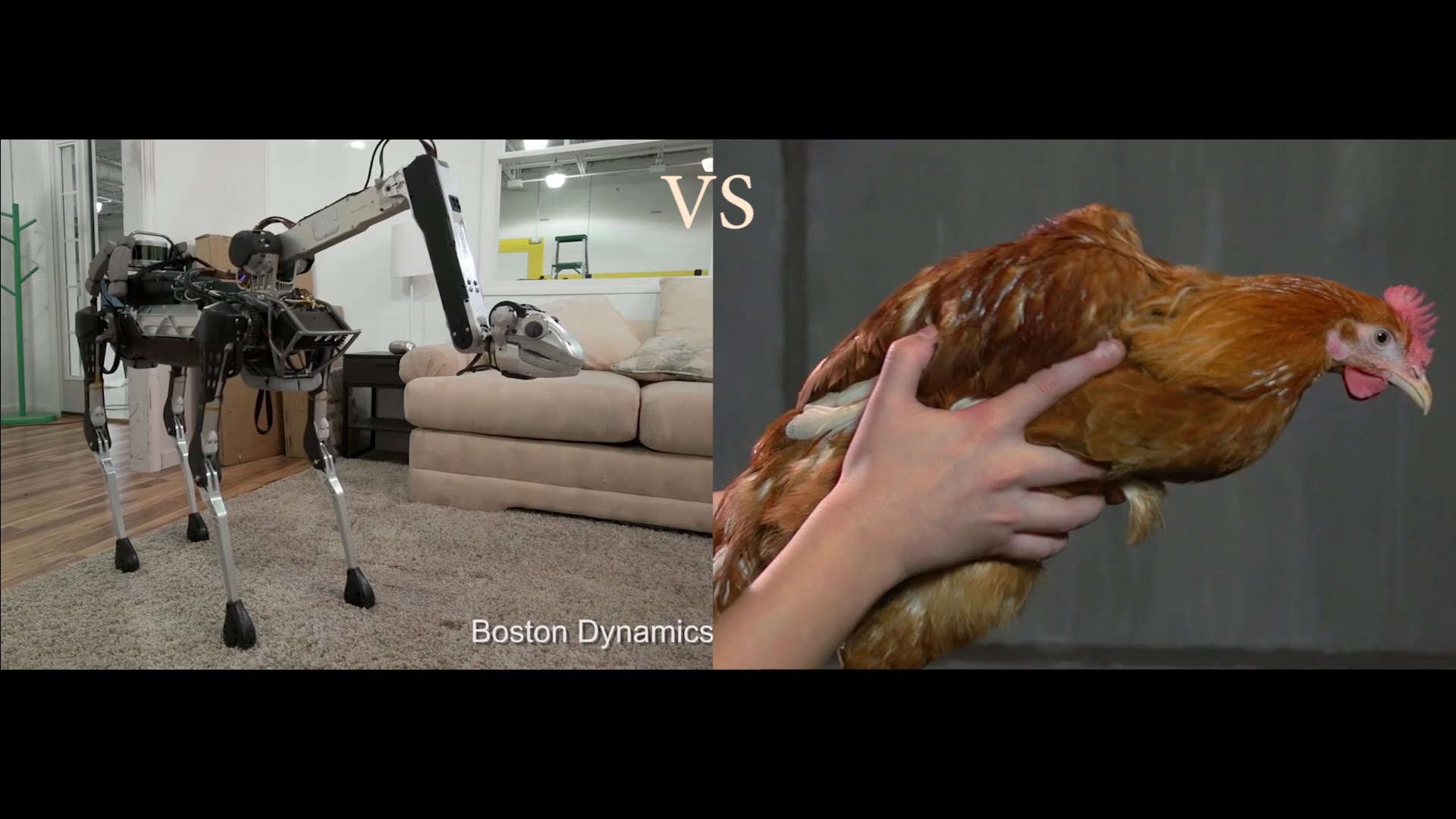
 Неподвижность куриной головы как идеал для подражания
Неподвижность куриной головы как идеал для подражания
Модератор заметил, что в данном случае разработчики развивали проект, в большей степени придерживаясь позиции пользовательского удобства и спросил, занимались ли конструкторы вопросом независимой мобильности. В этот момент на экране показали петуха в руках человека, который, держа его на весу, раскачивал в разных направлениях, но птица при этом сохраняла голову неподвижной. Райбер предложил посмотреть на то, как природа порой вдохновляет на улучшение роботов. «Это был обычный петух, способный стабилизировать свою голову,… и мы решили, что наделение Спота способностью делать это заметно повысит его умение манипулировать вещами в мире». Петуха на экране сменил СпотМини, который, стоя на месте и разогнув стрелу манипулятора, глубоко приседал и покачивал туловищем вправо-влево. При этом выставленный вперед его схват, напоминающий змеиную голову, подрагивая, в общем и целом не менял своей позиции в пространстве. Правда, до петуха, который во время таких же телодвижений держал голову совершенно неподвижно, роботу было еще далеко. Далее СпотМини стал демонстрировать умение сохранять стабильность конечной секции манипулятора, ходя по полукругу, приближаясь к схвату и удаляясь от него, а также удерживая в нем бокал, наполовину наполненный красной жидкостью, при этом снова шевеля телом и приседая. Во время этого опыта содержимое не вылилось на пол, однако сильно раскачивалось и в момент резкого движения поднялось до края, показав, что природный эталон неподвижности еще не достигнут.
«Конечно, если у вас есть подобный робот, то вы захотите, чтобы он не только смог провести уборку, но и принести пиво», - заметил Райбер, поясняя кадры, на которых СпотМини сначала взял на кухне стоявшую около мойки пустую жестяную банку и, осторожно приблизившись к мусорному ведру, бросил ее туда, а потом, зайдя в комнату с полной банкой в схвате, протянул ее сидевшему на диване и «читавшему книгу» инженеру. "Правда, это не пиво, а содовая вода", - уточнил Марк. Однако, когда испытатель попробовал взять протянутую ему роботом банку, тот «вдруг передумал» ее отдавать и, снова сжав, попятился назад. Увы, в короткой схватке за содовую воду легко победил человек, который, поняв, что направлявшие СпотаМини коллеги решили таким образом пошутить, с улыбкой вскочил с дивана. Почти сразу по окончании этого фрагмента тот самый «непослушный» четвероногий робот вышел на сцену и отвесил публике низкий поклон. Его сопровождал оператор с пультом дистанционного управления. Райбер рассказал, что с этого пульта робот только получает команды, а все системы контроля находятся у него на борту. По своей производительности они примерно равны трем ноутбукам, один из которых отвечает за все двигательные функции, и два обеспечивают работу зрительной системы. «У него есть стереокамера и другая камера в его руке», - продолжил рассказ Райбер, и СпотМини, распахнув створки схвата, показал узкое продолговатое окошко, служившее ему одним из органов зрения. Райбер заметил, что этот робот очень грациозно меняет свои аллюры, и в доказательство тот продемонстрировал, как легко переходит с рыси на иноходь, которыми обычно передвигаются животные. Он также может бегать и делать то, чего обычно не делают звери – а именно, прыгать только на двух ногах из разных пар, при этом сохраняя равновесие.
«Мы ищем руководства и вдохновения у природы везде, где можем их найти, однако надо признать, что у нас нет таких же доступных нам инженерных инструментов, которые есть у природы. Нам приходится делать все возможное на достижимых для нас уровнях сложности, потому что на молекулярном уровне у нас нет того, что есть у биологии»



 25.02.2018, 14:21
25.02.2018, 14:21

 Re: Основатель и генеральный директор компании Boston Dynamics Inc (Марк Райбер)
Re: Основатель и генеральный директор компании Boston Dynamics Inc (Марк Райбер)





